
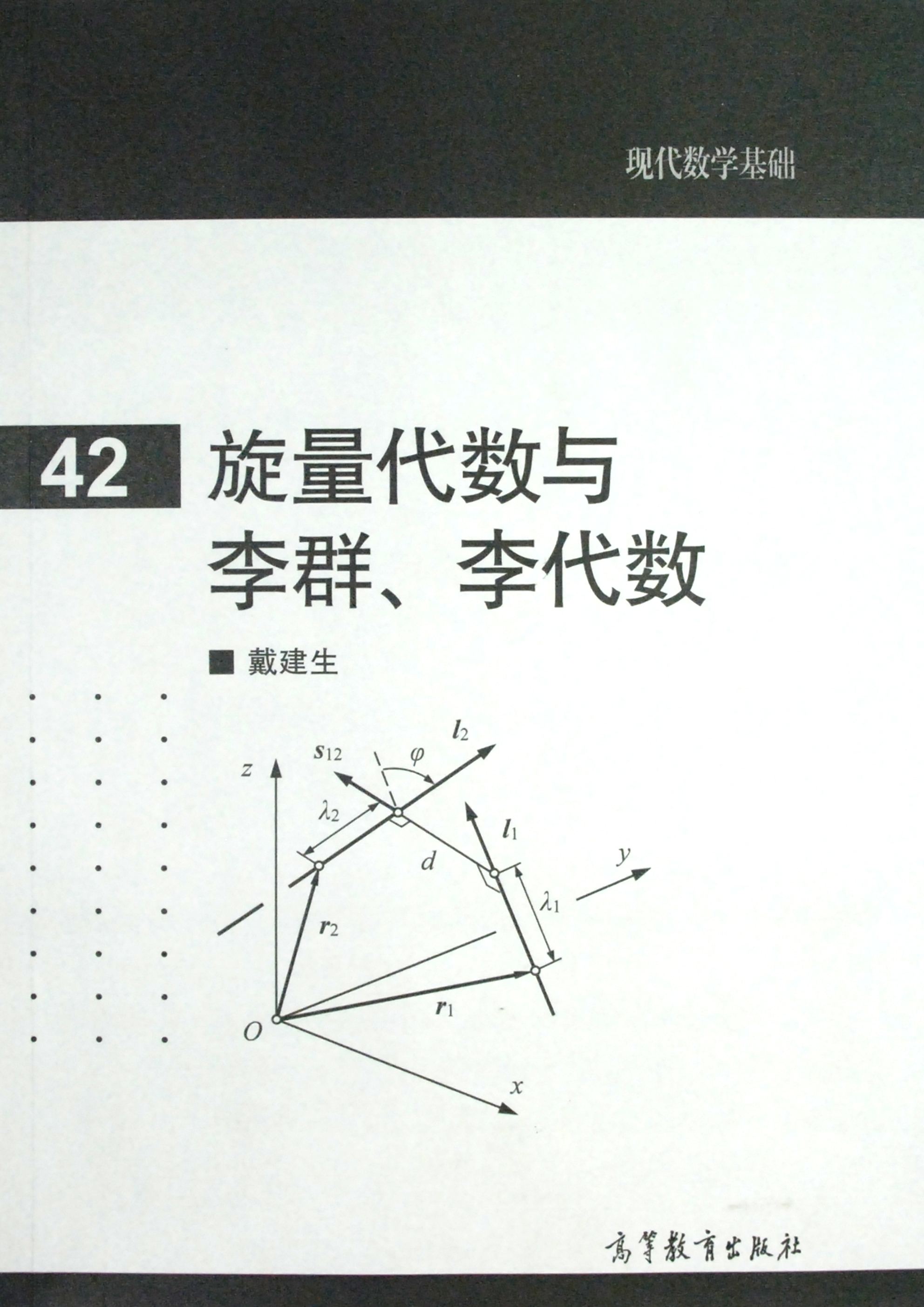







旋量代数与李群、李代数
作者: 戴建生
出版时间:2014-04-07
出版社:高等教育出版社
- 高等教育出版社
- 9787040318456
- 1
- 0045175754-6
- 16开
- 2014-04-07
- 350
《旋量代数与李群、李代数》全面深入地讲述了旋量代数理论及其几何基础,是一本贯通旋量代数与李群、李代数理论,深入研究其内在特性与关联结构以及旋量系理论的著作。
《旋量代数与李群、李代数》起始于直线几何与线性代数,紧密联系李群、李代数、Hamilton四元数、Clifford双四元数、对偶数等基本概念而自然过渡到旋量代数与有限位移旋量。作者在书中首次全面深入地阐述了旋量代数在向量空间与射影几何理论下的演变与推理,提出旋量代数与李代数、四元数代数等以及有限位移旋量与李群的关联论,展现出旋量理论与经典数学及现代数学的内在联系,并总结提炼出许多论证严密、意义明确的定理。
《旋量代数与李群、李代数》以公式推导和几何演示为主体,既展现出旋量代数、李群与李代数、四元数代数及其关联论等代数理论的严谨性,又体现了射影几何、仿射几何等的直观性及旋量系理论应用的广泛性,可作为对运动几何学、机构学、机器人学与计算机图形学感兴趣的数学系与计算机科学系的研究生与高年级本科生的教学用书,也可供理工科类非数学专业的学生和有关方向的科研工作者参考。
前辅文
第一章 绪论
1.1 旋量代数与李代数
1.2 有限位移旋量与李群
1.3 螺旋位移理论与有限位移旋量的近代发展史
1.4 有限位移旋量与李群的关联
1.5 旋量系及其关联关系理论
1.6 运动几何学与机构学
1.7 本书概述
参考文献
第二章 直线几何
2.1 点、向量和直线的坐标
2.1.1 位置向量和姿态向量
2.1.2 线矢量
2.1.3 Klein 型与Klein 二次曲面
2.2 直线的向量方程
2.3 射影几何与齐次坐标
2.4 平面方程与平面坐标
2.4.1 平面向量方程与平面坐标表示
2.4.2 三点确定的平面坐标
2.5 两点确定的直线方程及其射线形式的PlÄucker 坐标
2.6 两平面交线确定的直线方程及其轴线形式的PlÄucker 坐标
2.7 射线坐标与轴线坐标的固有属性与对偶性
2.7.1 直线坐标的参数关系
2.7.2 直线表示形式的对偶性
2.7.3 射线坐标与轴线坐标对偶定理
2.7.4 射线坐标与轴线坐标对偶关系
2.8 互矩不变性及两直线的交点
2.9 射影平面与四维空间的对偶性
2.10 直线系
2.10.1 线丛
2.10.2 线汇和线列
参考文献
第三章 旋量代数
3.1 旋量
3.1.1 旋量的概念
3.1.2 旋量的参数
3.1.3 坐标变换法则与不变量
3.2 旋量运算
3.2.1 互易积与Klein 型
3.2.2 旋量叉积
3.2.3 旋量微分
3.2.4 Killing 型
3.3 旋量与旋量运算的对偶表示
3.3.1 对偶数、对偶向量与矩量
3.3.2 旋量运算的对偶表示
3.4 速度旋量与Mozzi 瞬轴
3.4.1 螺旋运动速度场
3.4.2 速度旋量及其李代数表示
3.4.3 刚体运动
3.4.4 串联刚体
3.4.5 机械臂
3.5 力旋量与Poinsot 中心轴定理
3.5.1 对偶李代数se¤(3) 元素的力旋量
3.5.2 Poinsot 中心轴定理
3.5.3 力旋量参数
3.5.4 合成力旋量
3.6 几何量的向量表示
3.6.1 静力学与瞬时运动学的对应性
3.6.2 向量空间几何量的关联特性
3.7 互易性
3.8 正则旋量
3.9 李代数及其表示
3.9.1 李代数的概念
3.9.2 李代数伴随算子ad (X) 与伴随作用
3.9.3 李代数的向量形式
3.9.4 李代数的表示
3.10 李运算与李括号及其等价原理
3.10.1 标准4 £ 4 矩阵表示的李括号
3.10.2 交换子与Jacobi 恒等式
3.10.3 6 £ 6 伴随表示的李括号及其等价定理
参考文献
第四章 位移算子与指数映射
4.1 坐标变换
4.1.1 旋转变换
4.1.2 齐次变换
4.2 位移算子与坐标变换
4.2.1 位移算子
4.2.2 坐标变换与位移算子的关系
4.3 一般运动的仿射变换及其空间结构与群表示
4.4 旋转算子、旋转群SO(3) 与指数映射
4.4.1 群公理与李群
4.4.2 旋转群
4.4.3 Rodrigues 方程与so(3) 到SO(3) 的指数映射
4.5 Rodrigues 参数、Rodrigues 方程与Cayley 方程
4.5.1 平面运动的Rodrigues 参数与Rodrigues 方程
4.5.2 一般运动的Rodrigues 方程
4.5.3 旋转运动的Rodrigues 方程
4.5.4 旋转运动的Cayley 方程
4.6 研究旋转运动的四元数法及其与李群、李代数的关联
4.6.1 Hamilton 四元数与共轭四元数
4.6.2 Euler-Rodrigues 参数与Rodrigues 四元数
4.6.3 四元数与李群、李代数的关联
4.6.4 四元数形式的旋转操作与Rodrigues 方程
4.7 研究一般运动的对偶四元数法
4.7.1 对偶四元数与Hamilton 算子
4.7.2 Cli®ord 代数
4.8 经典位移算子的内在关联
参考文献
第五章 SE(3) 伴随作用的有限位移旋量
5.1 有限位移旋量算子与SE(3) 的伴随表示
5.1.1 Chasles 运动、李群SE(3) 与有限位移旋量矩阵
5.1.2 李群伴随算子Ad (g) 与伴随作用
5.1.3 李群SE(3) 的标准表示与伴随表示以及Rodrigues一般运动公式
5.1.4 李群SE(3) 元素的6 £ 6 有限位移旋量矩阵
5.1.5 有限位移旋量矩阵的传统分解与商群
5.2 有限位移旋量矩阵的Chasles 分解及其几何意义
5.2.1 绕任意旋量轴具有等效平移的纯旋转
5.2.2 沿轴线平移的矩阵形式以及有限位移旋量矩阵的Chasles分解
5.2.3 旋量特性算子
5.3 有限位移旋量矩阵的迹与参数
5.3.1 旋转角的相关迹
5.3.2 轴向平移的迹
5.4 有限位移旋量表示论
5.4.1 有限位移旋量矩阵的特征旋量
5.4.2 有限位移旋量表示法
5.4.3 有限位移旋量姿态平移表示法
5.5 有限位移旋量的组合运算
5.6 李群表示论与有限位移螺旋运动
5.6.1 李群表示
5.6.2 有限螺旋运动
5.7 李群运算及其对李代数se(3) 的伴随作用
5.7.1 李群运算与对自身的伴随作用
5.7.2 基于有限位移旋量的李群对李代数伴随作用的共轭运算
5.7.3 对李代数se(3) 向量形式的左作用
5.8 有限位移旋量矩阵的微分与李代数se(3) 的瞬时旋量
5.8.1 有限位移旋量矩阵的微分
5.8.2 se(3) 到SE(3) 的指数映射
5.9 有限位移旋量表示的Chasles 运动分解
5.9.1 实现刚体位移的伴随作用
5.9.2 有限位移旋量算子的几何量
5.9.3 有限位移旋量表示的Chasles 运动执行过程
5.10 旋量代数、李群与李代数的关联论
5.10.1 旋量代数、李群与李代数、有限位移旋量、四元数代数的关联
5.10.2 李群、李代数与有限位移旋量、瞬时旋量关联图
5.10.3 有限位移旋量、瞬时旋量、李群及李代数发展史
参考文献
第六章 互易性与旋量系
6.1 旋量的互易性
6.1.1 几何特性与物理含义
6.1.2 运动与约束中的互易关联
6.2 旋量的相关性
6.2.1 旋量相关的充分必要条件
6.2.2 两个旋量的相关性
6.2.3 具有相同旋距的三个旋量的相关性
6.2.4 具有相同旋距的四个、五个与六个旋量的相关性
6.2.5 旋量算子的不变性
6.3 旋量系、基本集与张成多重集
6.3.1 旋量系
6.3.2 旋量系的集合运算
6.3.3 旋量系转换定理与阶数定律
6.3.4 基本集
6.3.5 张成多重集
6.4 旋量系的组合
6.4.1 合成旋量为线矢量的条件
6.4.2 二阶旋量系的组合
6.4.3 零旋距的三阶旋量系的组合
6.4.4 零旋距的四阶旋量系的组合
6.4.5 广义方程与合成线矢量的构造
参考文献
第七章 旋量系关联关系理论
7.1 旋量系关联关系定理
7.1.1 旋量系与互易旋量系
7.1.2 旋量系交集定理
7.1.3 旋量系关联关系定理
7.2 一阶旋量系与其互易旋量系
7.2.1 一阶旋量系关联关系
7.2.2 关联关系的识别
7.3 二阶旋量系与其互易旋量系
7.3.1 空交集
7.3.2 部分交集
7.3.3 全交集
7.3.4 协互易旋量系
7.4 三阶旋量系与其互易旋量系
7.4.1 空交集
7.4.2 一维交集
7.4.3 多维交集
7.4.4 全交集
7.5 具有协互易基的旋量系
参考文献
第八章 旋量系零空间构造理论
8.1 旋量系零空间数学表示
8.2 构造一维零空间的矩阵增广法
8.3 一维零空间的代数余子式法
8.4 五阶旋量系零空间的代数余子式法
8.4.1 旋量系的增广
8.4.2 互易旋量系的构造
8.5 多维零空间构造理论
8.5.1 矩阵分块
8.5.2 子矩阵增广
8.5.3 求解法则
8.5.4 移位分块与逐级增广
8.6 齐次线性方程组求解理论
8.6.1 齐次线性方程组求解法则与步骤
8.6.2 基于多维零空间构造理论的求解法则与Gauss-Seidel 消元法
8.6.3 递归分块与增广
8.7 互易旋量系构造理论
8.7.1 6 ¡ n 阶互易旋量系构造方法
8.7.2 移位分块以构造三阶、四阶互易旋量系
8.7.3 6 ¡ n 阶互易旋量系构造步骤
8.7.4 逐级增广与递归分块
8.8 误差分析与算法效率
参考文献
第九章 旋量系对偶原理与分解定理
9.1 对偶原理
9.1.1 互易与对偶
9.1.2 并联机构运动旋量空间与力旋量空间的交并集对偶原理
9.1.3 串联机构与并联机构旋量空间的对偶原理
9.1.4 物体抓持、并联机构和串联机构对偶原理一览表
9.2 运动支链旋量系与基本旋量系
9.2.1 运动支链旋量系
9.2.2 四个基本旋量系
9.3 基本旋量系的对偶定理
9.3.1 基本旋量系的互易关系定理
9.3.2 基本旋量系的从属关系定理
9.3.3 基本旋量子空间的从属与互易关联结构
9.4 公共约束旋量系与其多重集
9.5 互补约束旋量系与其多重集
9.6 约束旋量系分解定理
9.6.1 输出杆件约束旋量多重集与互补约束旋量多重集
9.6.2 冗余约束旋量多重集
9.6.3 分解定理与分解过程
9.7 约束、运动旋量系间以及与多重集的关联关系
9.7.1 互补约束旋量系与冗余约束旋量多重集的关联关系
9.7.2 约束与运动旋量系以及冗余约束旋量多重集的关联关系
9.7.3 约束冗余因子
9.7.4 有限位移旋量系、多重集及整周运动
9.8 公共约束旋量系与互补约束旋量系的关联关系
9.8.1 公共约束、互补约束与输出杆件约束旋量系的关联关系
9.8.2 约束旋量系与冗余约束旋量多重集的关联关系
9.9 活动度扩展准则
9.9.1 约束与活动度
9.9.2 基于公共约束与冗余约束的活动度扩展准则
9.9.3 基于机构环路的活动度扩展准则
9.9.4 活动度扩展准则与旋量系阶数及旋量多重集基数的关联关系
9.10 Sarrus 连杆机构中机构运动与平台约束的对偶特性
9.10.1 支链运动旋量系与机构运动旋量系
9.10.2 支链约束旋量系与运动平台约束旋量系
9.10.3 运动平台旋量系与机构旋量系的交集
9.11 可展球体机构的对偶特性
9.11.1 扩展Sarrus 机构
9.11.2 n-支链平台单元
9.12 Schatz 连杆机构的运动与约束旋量系
9.12.1 可逆转的立方体和Schatz 连杆机构
9.12.2 运动旋量系与约束旋量系
9.12.3 中心连杆的运动循环
参考文献
附录
索引
后记
